Futaba S-CD500KS - 1/10 Electric Drift Car Knuckle Servo
Introducing the "knuckle servo," which breaks the conventional wisdom of steering structures in RC cars. Unleash new possibilities on your beloved car.
- The S-CD500KS is a servo compatible with "UR mode" and "SR mode".
- To use this product, you will need one of the upgraded versions of your T10PX, T10PXR, T10XCR, or T6PV radio, in addition to the GYD560 gyro.
Features:
- No tie rods, therefore no bump changes.
- Lightweight design is possible because mechanical linkage parts are not required.
- Ackermann adjustment and other settings can be changed wirelessly from a compatible transmitter.
- Steering toe angle can be mixed via the trigger of the compatible transmitter.
- Smooth operation even at large steering angles
Specs:
- Size: 32.0 x 16.6 x 27.6 mm
- Weight: 20.7 g
- Speed: 0.130 sec/60° (6.0V) / 0.165 sec / 60° (4.8V)
- Torque: 2.4 kg/cm (6.0V) / 2.0 kg/cm (4.8V)
- Operating voltage: 4.8V to 6.0V
- Lead wire length: 330mm
- This servo is a steering servo for 1/10 scale electric 2WD drift cars.
Software Notes:
- The GYD560 requires a software update to version 2.0 or later.
- Software updates are required for T10PX(R) and T10XCR to Ver. 16.0 or later, and for T6PV to Ver. 4.0 or later.
- The transmitter needs a function to mix two steering servos.
- Please use the ESC's BEC output at 6.0V. Using the BEC output at 7.4V may cause damage.
- A humming sound may be heard when the power is turned on, but this is not a malfunction.
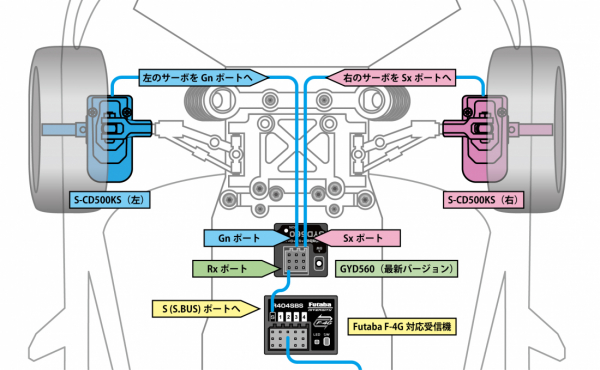
Connection Method
*Please install the wiring so that it does not come into contact with the wheel.
If the wiring is broken, it may become inoperable or short-circuit, causing damage.

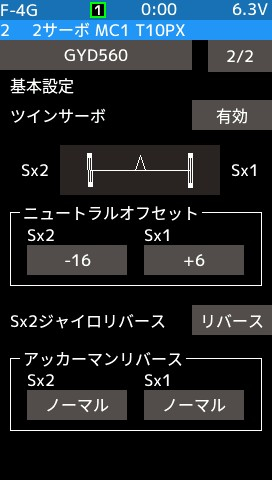
Example of settings screen for T10PXR and GYD560
● Ackermann rate and limit settings can be set independently for the left and right servos.
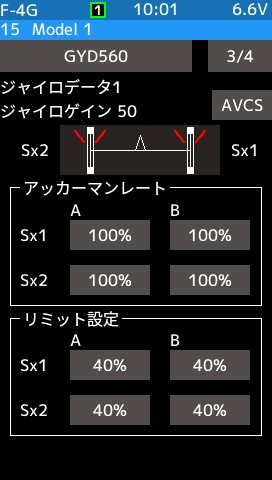
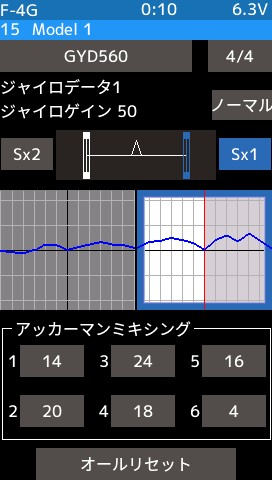
● Each of the left and right servos can be set to 12 points for the Ackermann curve.
● "Twin Servo Setting": The neutral position of the left and right steering servos can be set independently.
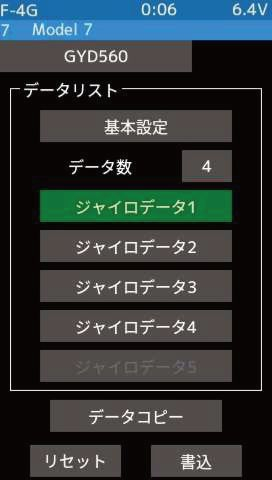
● Added a function to copy gyro data.
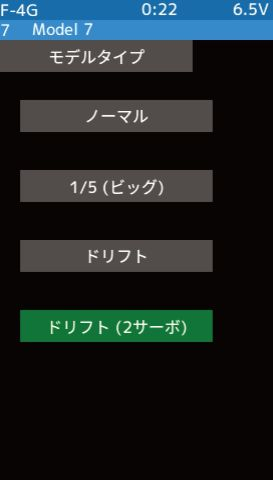
● Added "Drift (2 Servos)" to the model types.
Set the model data to the initial values for 2 servos.
● Knuckle servo mixing function
You can choose between "Steer" mode, which is related to the direction of steering input, and "Toe" mode, which is not.


The example in the diagram above shows brake-to-steering mixing, but throttle-to-steering mixing is also possible.
Accessories (for the 2-piece set)
- Upper rod end x 2 (4 pieces)
- Axle shaft x 1 (2)
- Spacer x 1 (2)
- M2 nut x 1 (2 pieces)
- M2 screw x 1 (2 pieces)
Additionally, two bearings are required for each servo (four bearings if there are left and right servos).